基于 C++/Qt 的双路 2D 激光雷达 3D 点云重构与空间配准技术实践
2026-03-07
在智能交通(ITS)与工业检测领域,出于成本与数据处理效率的考量,常采用多路 2D 激光雷达(LiDAR)替代昂贵的 3D 激光雷达。本文将探讨如何利用 C++ 与 Qt 框架,对双路 2D 激光雷达(垂直与倾斜安装)的原始报文进行解析、极坐标映射、时序堆叠与空间滤波,最终在 2D 渲染管线中实现工业级 3D 车辆轮廓的实时重构与多传感器数据融合。
1. 核心原理:极坐标系到直角坐标系的映射
雷达硬件 SDK 返回的底层报文通常是极坐标数据,包含起始角度 (angle_min)、角度分辨率 (angle_increment) 以及距离数组 (ranges)。在进行任何空间处理前,必须将其转换为物理世界的笛卡尔直角坐标系。
数学转换公式:
$$X = r \cdot \cos(\theta)$$
$$Y = r \cdot \sin(\theta)$$
C++ 解析与转换实现:
QVector<QPointF> DataProcessor::parseLidarData(const ladar_data_t& data, float xOffset, float angleOffset) {
QVector<QPointF> pointCloud;
// 遍历极坐标距离数组
for (int i = 0; i < data.point_count; ++i) {
float r = data.ranges[i];
// 过滤硬件返回的无效点(通常为 0 或超出最大射程的值)
if (r <= 0.01f || r > MAX_RANGE) continue;
// 计算当前点的实际偏航角 (引入外部角度校准补偿)
float theta = data.angle_min + i * data.angle_increment + angleOffset;
// 极坐标转直角坐标 (引入 X 轴水平平移补偿)
float x = r * std::cos(theta) + xOffset;
float y = r * std::sin(theta);
pointCloud.append(QPointF(x, y));
}
return pointCloud;
}
2. 基于时序堆叠的伪 3D 重构
单次 2D 扫描只能获取目标物体的一个横截面。为了还原 3D 轮廓,系统利用物体(如车辆)匀速穿过扫描面的物理特性,在内存中维护一个定长的历史帧队列(std::deque)。
在 UI 渲染阶段(Qt paintEvent),通过遍历历史帧,为老数据赋予持续递增的 Y 轴视觉偏移量 与 Alpha 透明度衰减,从而在 2D 屏幕上渲染出具有深度感的立体拖影。
Qt 渲染层核心代码:
void PointCloudViewer::paintEvent(QPaintEvent *event) {
QPainter painter(this);
painter.setRenderHint(QPainter::Antialiasing);
// 建立视图矩阵:将物理坐标系(米)映射为屏幕坐标系(像素),并居中缩放
QTransform transform;
transform.translate(width() / 2.0, height() / 2.0);
transform.scale(zoomFactor, zoomFactor);
painter.setTransform(transform);
// 遍历绘制历史帧队列 (historyFrames_230)
int index = 0;
int maxFrames = historyFrames_230.size();
for (auto it = historyFrames_230.begin(); it != historyFrames_230.end(); ++it, ++index) {
// 计算透明度衰减:越老的数据越透明
int alpha = 255 * (1.0f - static_cast<float>(index) / maxFrames);
painter.setPen(QColor(255, 0, 0, alpha)); // 垂直雷达使用红色绘制
// 核心:基于帧索引施加视觉偏移量,形成瀑布流 3D 效果
float visualOffsetY = index * 0.05f; // 每帧向下偏移 5cm
// 批量绘制点云,提升渲染性能
for(const QPointF& pt : *it) {
painter.drawPoint(QPointF(pt.x(), pt.y() + visualOffsetY));
}
}
}
3. 空间滤波与噪点抑制
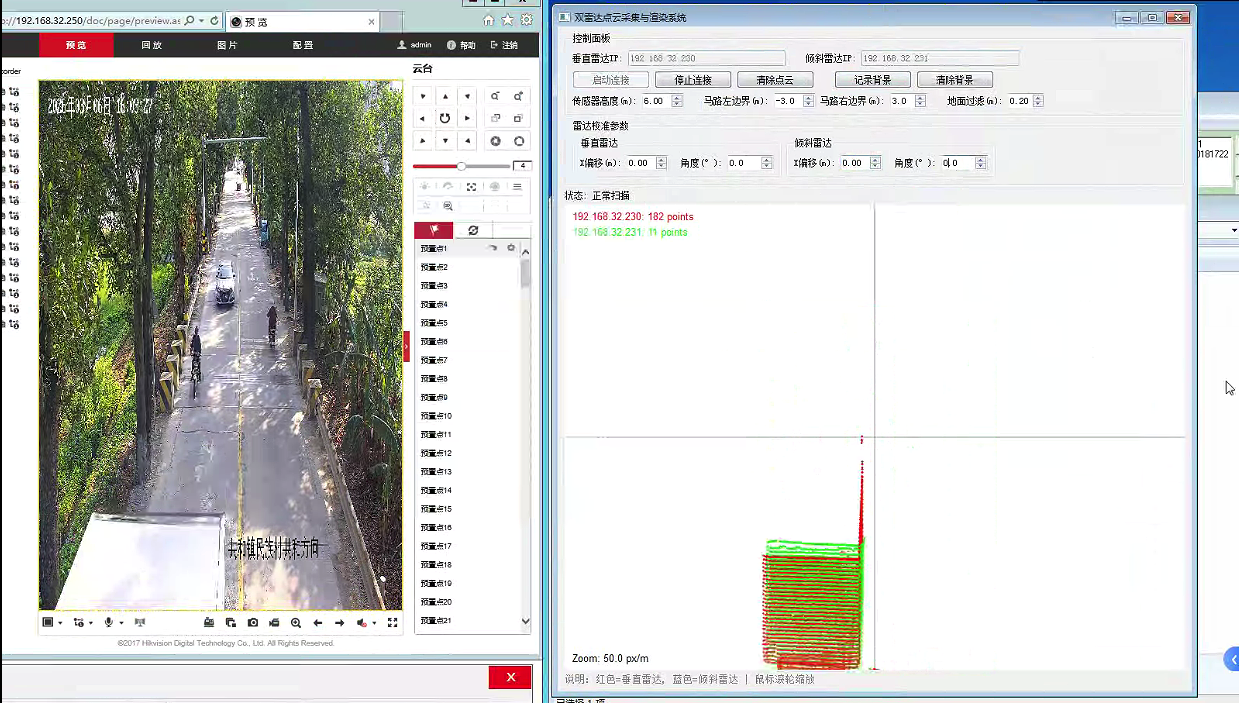
在真实的工业户外环境(如林荫路面)中,树叶摇摆、地面起伏会产生海量动态噪点,导致瀑布流画面极度杂乱。系统引入了两种核心滤波机制来提取干净的前景轮廓。
3.1 环境背景减除
在空旷状态下缓存一帧静态环境的距离数组 bgRanges。实时扫描时,采用差分阈值法剔除静态背景。
3.2 ROI 感兴趣区域裁剪
在直角坐标系下,通过人为设定硬性边界,进行空间裁剪:
X 轴限制:切除马路边界之外的噪点。
Y 轴限制:结合传感器物理安装高度,切除贴近地面的地面反射噪点。
滤波逻辑实现:
// 在直角坐标转换内部进行的滤波逻辑
float diff = bgRanges[i] - r;
// 1. 背景过滤:距离差值小于 5cm,判定为静止背景,直接丢弃
if (diff < 0.05f) continue;
// 2. ROI 空间裁剪 (X轴路宽过滤,Y轴地面过滤)
if (x < roadMinX || x > roadMaxX) continue;
if (y > (sensorHeight - 0.20f)) continue; // 剔除距离地面 20cm 以内的点
// 通过所有滤波器后,才作为有效前景点云保留
pointCloud.append(QPointF(x, y));
4. 多传感器空间配准
由于物理安装的机械公差,垂直雷达与倾斜雷达的数据在绝对空间中无法完美重合。系统在应用层提供了矩阵平移与旋转的补偿接口。
配准策略:以垂直向下照射的雷达作为绝对基准(Reference),保持其 X 偏移和角度偏移为 $0$。在 UI 面板中开放倾斜雷达的 $X\text{_Offset}$ 参数,通过实时观测瀑布流的边缘贴合度,手动微调该补偿值,最终实现双路点云(红色与绿色)在空间中的严丝合缝。
通过上述 C++ 底层解析与 Qt 上层渲染管线的结合,系统能够稳定处理高频($50\text{Hz}+$)的双路并发 LiDAR 数据,并实现了极低的渲染延迟与高纯净度的 3D 轮廓提取。
5. 架构深潜:跨线程无锁数据同步
在使用厂家提供的原生 C++ SDK 时,最大的架构挑战来自于线程隔离。
SDK 的 ILadarPoller 是一个阻塞式的轮询器,必须在其专属的后台工作线程中调用 poller->Run()。这就意味着,每次雷达抓取到新数据并触发 OnLadarFrame 回调函数时,程序的执行上下文都在后台硬件线程中。
然而,Qt 框架严格规定:所有针对 UI 控件的重绘操作(如 QPainter 绘图)必须且只能在主 GUI 线程中执行。 如果在硬件回调中直接去刷新界面,程序会瞬间崩溃(Segfault)。
为了解决这个问题,系统引入了 Qt 的异步信号与槽 (Signals and Slots) 机制,结合 qRegisterMetaType,实现了一个高效的跨线程无锁数据泵。
5.1 核心挑战:跨线程传递自定义复合数据
我们需要将解析好的点云数组 QVector<QPointF> 从后台线程“扔”给主线程。在 Qt 中,要让自定义的复合数据类型能够安全地跨越线程边界,必须先将其注册到 Qt 的元对象系统 (Meta-Object System) 中。
在 main.cpp 的最开头,执行类型注册:
#include <QApplication>
#include <QVector>
#include <QPointF>
#include <QMetaType>
#include "mainwindow.h"
int main(int argc, char *argv[]) {
QApplication a(argc, argv);
// 【关键步骤】:注册点云数组类型,允许其作为参数在跨线程信号中传递
qRegisterMetaType<QVector<QPointF>>("QVector<QPointF>");
MainWindow w;
w.show();
return a.exec();
}
5.2 后端数据泵:LidarManager 的信号发射
在底层封装类 LidarManager 中,我们负责接收 SDK 的 C 风格静态回调,完成数据清洗与极坐标转换,最后通过 emit 将组装好的点云数据发射出去。
// LidarManager.h
class LidarManager : public QObject {
Q_OBJECT
public:
// ... 初始化与启动代码 ...
signals:
// 定义信号:携带设备 IP (用于区分雷达) 和 解析后的点云数组
void pointCloudReady(QString deviceIp, const QVector<QPointF>& points);
private:
// SDK 要求的静态 C 风格回调函数
static void OnLadarFrame(ILadar* ladar, const ladar_data_t* data, void* userData);
};
// LidarManager.cpp
void LidarManager::OnLadarFrame(ILadar* ladar, const ladar_data_t* data, void* userData) {
// 1. 提取实例指针与设备 IP
LidarManager* manager = static_cast<LidarManager*>(userData);
QString ip = QString::fromStdString(ladar->GetIp());
// 2. 过滤非 2D 扫描报文 (命令字 110)
if (data->cmdWord != 110) return;
// 3. 调用业务逻辑,执行极坐标转直角坐标、背景减除、ROI 裁剪
QVector<QPointF> processedPoints = manager->dataProcessor.parseAndFilter(*data);
// 4. 【跨线程发射】:此处代码依然在后台 SDK 线程运行
// emit 会将数据深拷贝并放入主线程的事件队列 (Event Loop) 中,实现无锁线程解耦
emit manager->pointCloudReady(ip, processedPoints);
}
5.3 前端接收:UI 线程的安全重绘
在 Qt 的 MainWindow 中,我们将后端发射的信号连接到前端的渲染槽函数。
默认情况下,当发送方(LidarManager)和接收方(PointCloudViewer)不在同一个线程时,Qt 会自动采用 队列连接 (Qt::QueuedConnection)。这保证了槽函数一定会在主 GUI 线程中被安全调度执行。
// MainWindow.cpp
MainWindow::MainWindow(QWidget *parent) : QMainWindow(parent) {
// ... UI 初始化 ...
lidarManager = new LidarManager(this);
// 将后端的就绪信号,连接到前端视图的更新槽函数
connect(lidarManager, &LidarManager::pointCloudReady,
ui->pointCloudViewer, &PointCloudViewer::onPointCloudReceived);
}
// PointCloudViewer.cpp
// 该槽函数将被主 UI 线程的 Event Loop 自动唤醒执行
void PointCloudViewer::onPointCloudReceived(QString deviceIp, const QVector<QPointF>& points) {
// 将新数据推入历史帧双端队列 (std::deque),用于后续瀑布流渲染
if (deviceIp == "192.168.1.230") {
historyFrames_230.push_front(points);
if (historyFrames_230.size() > MAX_HISTORY_FRAMES) {
historyFrames_230.pop_back(); // 维持队列长度
}
} else {
historyFrames_232.push_front(points);
if (historyFrames_232.size() > MAX_HISTORY_FRAMES) {
historyFrames_232.pop_back();
}
}
// 触发 paintEvent 重绘界面
this->update();
}
5.4 资源释放与防僵尸进程
工业级应用的一个关键指标是“平滑退出”。如果直接关闭主窗口,后台挂起的 SDK 轮询线程会成为僵尸进程,甚至可能锁死网络端口导致下次启动失败。
必须在主窗口关闭事件 (closeEvent) 中,执行严谨的清理逻辑:
void MainWindow::closeEvent(QCloseEvent *event) {
if (lidarManager) {
// 1. 通知底层 SDK 停止轮询并断开连接
lidarManager->stopConnection();
// 【LidarManager::stopConnection 内部实现参考】:
// poller->Stop();
// 必须等待后台线程安全结束 (join)
// thread->join();
// 最后销毁对象防内存泄漏
// DeleteLadarPoller(poller);
}
event->accept();
}
通过这种严格的责任隔离:底层 C++ 线程专注高频数据摄取与数学运算,Qt 主线程专注事件分发与像素渲染,我们不仅避开了多线程锁带来的性能瓶颈,还保障了系统在 $50\text{Hz}$ 双路雷达高频轰炸下的绝对稳定性。
6. 踩坑与避坑指南
在将这套系统从理论推导落地到复杂的工业现场的过程中,我遇到了几个非常经典的物理与软件级难题。以下是核心问题的复盘与解决思路:

一:瀑布流渲染变成密集的“百叶窗 / 条形码”
现象:引入时间序列堆叠(瀑布流)后,屏幕上并没有出现物体的 3D 轮廓,而是被密密麻麻的垂直线条填满,整个画面像被拉伸的条形码。
根本原因:雷达扫到了桌面、墙壁等静止的背景。当程序每一帧都把这些静止的点施加 Y 轴偏移量(往下推)并画出来时,同一个静止点在屏幕上就会连成一条长长的实线。
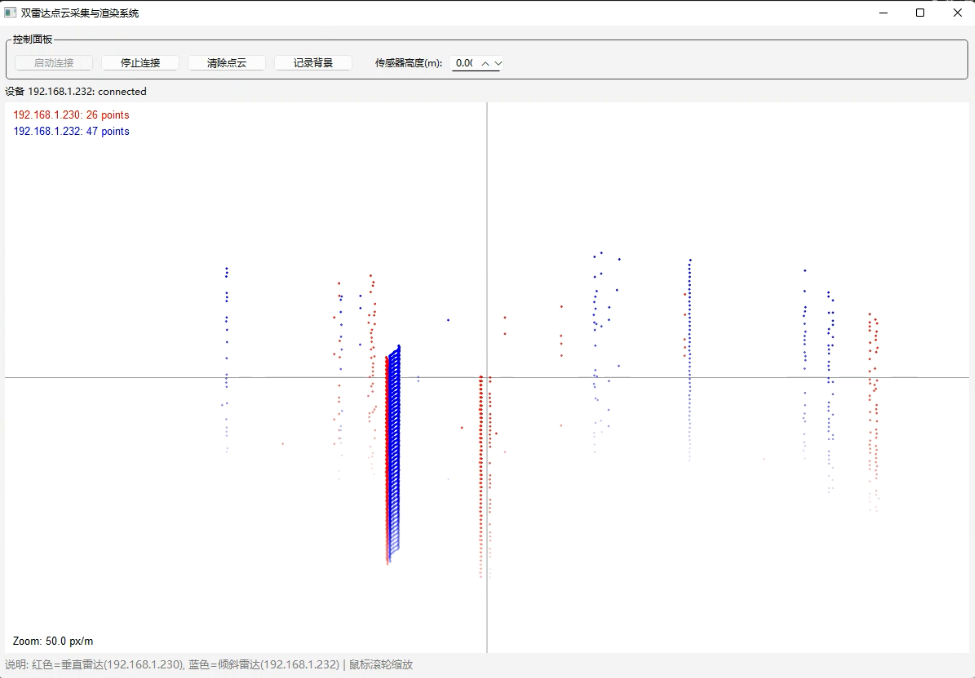
解决(背景减除):引入
Background Subtraction算法。在UI上增加[记录背景]功能,系统启动时抓取一帧无障碍物的静态距离数组bgRanges。后续每一帧点云必须与bgRanges进行差值比对,差值大于阈值(如 $5\text{cm}$)的点才被认定为有效的前景(Moving Object),静止点直接丢弃不渲染。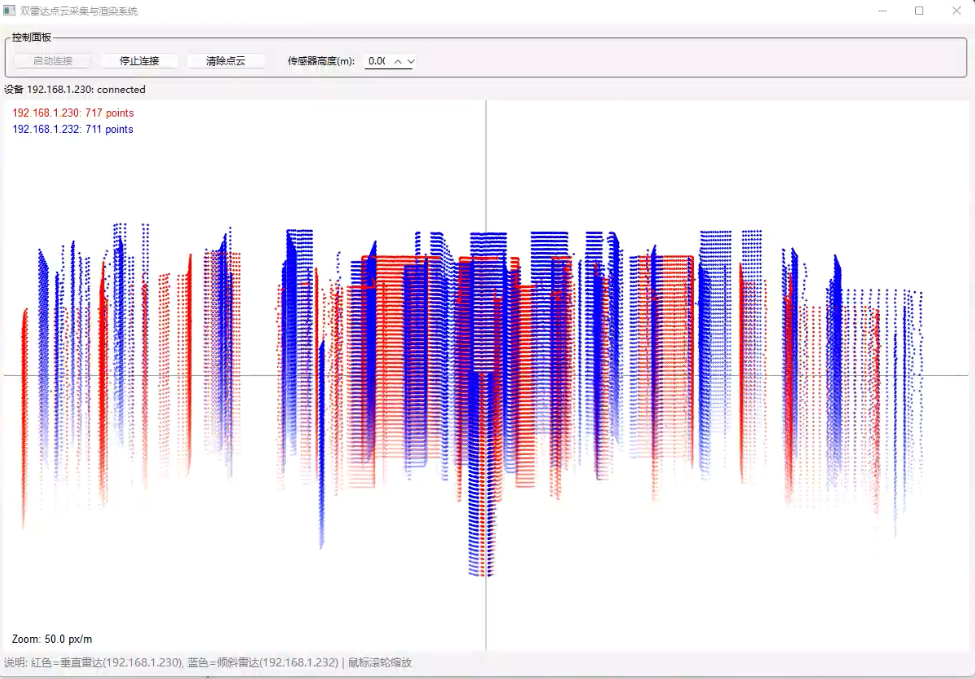
二:桌面测试时,纸箱只能扫出“两条平行的实线”
现象:背景过滤写好后,拿一个长方体纸箱从雷达前滑过,屏幕上只留下了两条长长的红线,完全看不出长方体的形状。
根本原因:物理坐标系的认知错位。 桌面测试时,雷达是平放在桌面上“平视”前方的。当纸箱横向滑过时,雷达的 2D 激光束其实只切到了纸箱垂直的“侧面”(一个平面在 2D 截面中就是一条线)。
解决(物理姿态模拟):要还原 3D 轮廓,传感器的相对运动姿态必须正确。将雷达移到桌子边缘并垂直向下照射(模拟真实龙门架的俯视视角),让纸箱从雷达正下方的地板上穿过。此时雷达切中的是纸箱的顶部,瀑布流瞬间完美拼合出了长方体的立体轮廓。
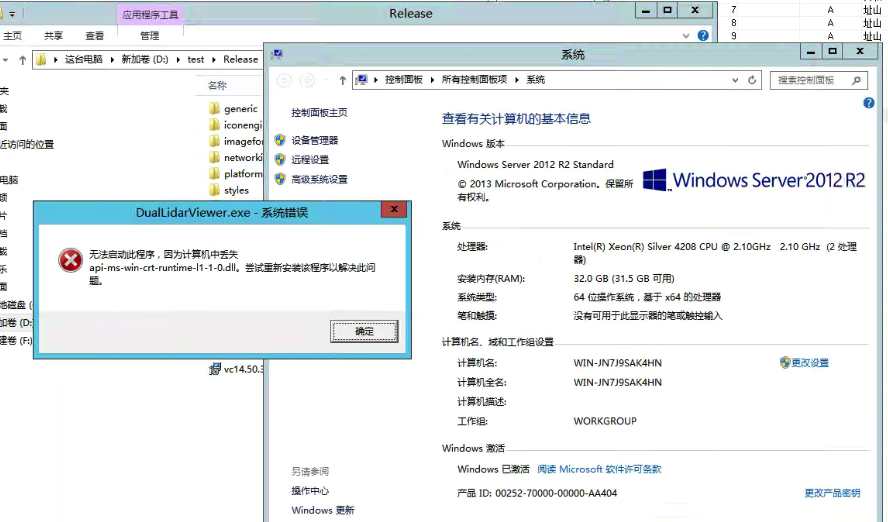
三:老旧服务器的“DLL 地狱”与 DX12 崩溃
现象:在开发机(Win 10/11)上运行完美的 Qt 6 编译产物,复制到现场的 Windows Server 2012 R2 和 Windows 7 机器上后,接连报
MSVCP140.dll缺失、api-ms-win-crt-runtime-l1-1-0.dll缺失,最后直接抛出致命错误:无法定位程序输入点 CreateDXGIFactory2 于动态链接库 dxgi.dll 上或缺失d3d12.dll。根本原因:现代的 Qt 6 框架彻底抛弃了 Win 10 以下的操作系统,其底层图形渲染硬件接口(RHI)强依赖 DirectX 12。而 Server 2012 R2 和 Win 7 内核最高只支持 DX11,属于物理级别的硬不兼容。
解决(降级与离线打包):
降级编译:果断在开发机安装 Qt 5.15.2 (MSVC 2019)。由于我们的业务代码未用激进新特性,直接修改
CMakeLists.txt中的Qt6为Qt5即可无缝编译。Qt 5 会在老系统上自动优雅降级为 OpenGL 或纯软件渲染。UCRT 离线补全:针对老系统无法联网安装 C++ 运行库的问题,直接从开发机的 Qt
bin目录中,提取全部的api-ms-win-crt-*.dll与ucrtbase.dll,连同厂家的ladarsdk_gd.dll一起打包放在.exe同级目录下,实现真正的“绿色免安装”即插即用。
四:户外复杂环境导致的“满屏噪点”
现象:设备挂载到真实的林荫道龙门架后,画面两侧出现大量随风飘动的竖线,且车辆下方拖着长长的地面反光残影。
根本原因:户外的树叶在风中摇晃,地面的轻微起伏或积水反光,这些动态变化突破了背景过滤的容差阈值(
$5\text{cm}$),被系统误认为是“移动物体”。解决(ROI 空间滤波):在直角坐标系转换层,直接施加粗暴但极度有效的感兴趣区域 (Region of Interest) 裁剪。
设定
马路左/右边界(如$X \in [-3.0\text{m}, 3.0\text{m}]$),越界点(路边的树木)直接丢弃。设定
传感器高度并计算离地间隙(如$Y > \text{SensorHeight} - 0.2\text{m}$),剔除所有贴近地面的噪点。如同给雷达戴上了眼罩,只保留了车道中央的纯净数据。
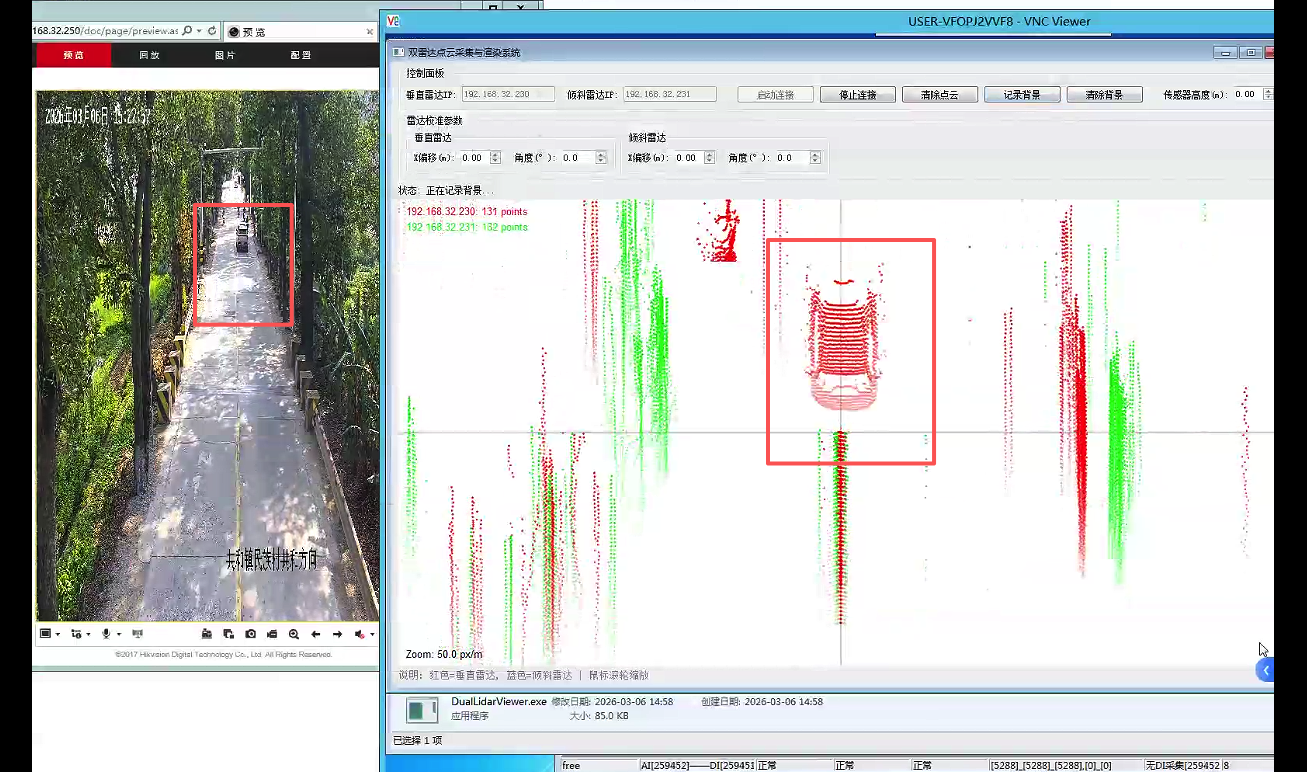
五:双路雷达点云“分身错位”
现象:垂直雷达(红色)和倾斜雷达(绿色)扫描同一辆汽车时,屏幕上出现了两个没有重合的汽车轮廓(例如红车在右,绿车在左)。
根本原因:多传感器物理安装公差。 倾斜雷达在龙门架上的实际安装偏角和横向位置,与垂直雷达不可能达到绝对的数学完美,导致两套坐标系在绝对空间中存在水平平移。
解决(软件层空间配准 Calibration):遵循“以垂直雷达为绝对基准”的原则。垂直雷达照射地面最真实,不做任何位移;在 UI 界面为倾斜雷达暴露
$X\text{_Offset}$(X轴平移)参数。当车辆驶过时,通过软件滑动条实时为倾斜雷达的数据叠加补偿值,直到红绿边缘严丝合缝地重叠,完成最终的数据级融合。